























Robotic Hand Detaches to Efficiently Collect Objects
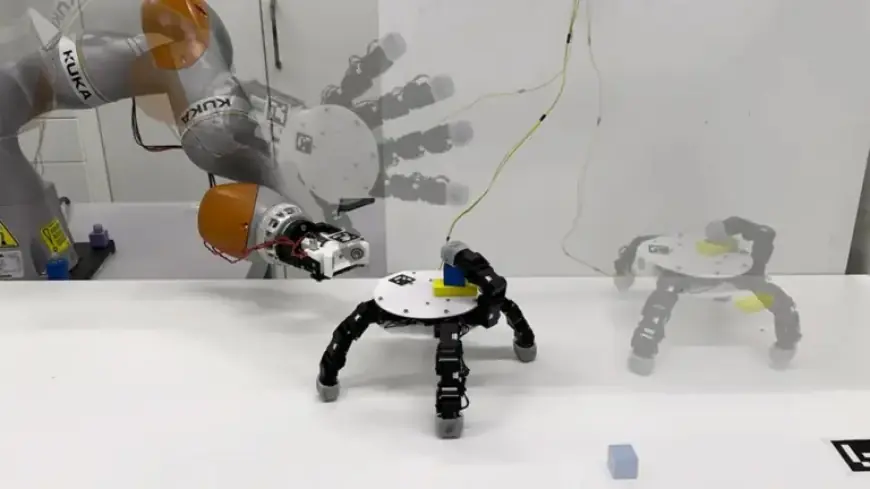
Engineers at the Swiss Federal Technology Institute of Lausanne (EPFL) have developed a unique detachable robotic hand. This innovative device is designed to navigate difficult spaces, making it possible to efficiently collect objects. Its spider-like structure allows it to function independently or as part of a robotic system.
Design and Functionality of the Robotic Hand
The robotic hand features multiple fingers and can operate in both gripping directions. This reversible functionality enables it to act as if it has two functional palms. The study detailing this development was published on January 20 in Nature Communications.
This robotic hand operates independently, detaching from a robotic arm to access tight or hazardous areas. After retrieving an object, it can return and reattach. This capability opens up new possibilities for applications in industrial, exploratory, and disaster recovery scenarios.
Overcoming Limitations of Human Dexterity
Aude Billard, co-author and head of the Learning Algorithms and Systems Laboratory at EPFL, highlighted the challenges faced by human hands. Tasks such as reaching under furniture or simultaneously holding objects can be difficult and require awkward motions. The robotic hand aims to overcome these limitations.
Inspiration from Nature
The robotic hand’s design is inspired by nature. Similar to how an octopus navigates the seafloor, or a praying mantis uses its arms, the hand integrates locomotion and manipulation smoothly. This natural inspiration enhances its functioning across various tasks.
Capabilities and Performance
- The hand can grasp up to four objects simultaneously.
- It can crawl on surfaces while carrying items.
- Each finger is powered by small motors and linked via lightweight 3D-printed joints.
- Joint flexibility allows fingers to curl and spread in both directions.
To enhance grip, the fingertips are covered with a soft silicone layer, improving friction and object retention. Billard stated that the number of objects the hand can hold is limited only by the number of fingers added to it.
Reattachment and Future Applications
The hand employs a “snap-and-lock” system for reattachment. Magnets aid in aligning connectors, while a motor-driven locking bolt secures the joints. This system shows potential for future applications, including human prosthetics or enhanced capabilities in specialized environments.
Billard emphasized the value of the robot’s symmetrical, reversible functionality. The study of additional robotic fingers has indicated the brain’s adaptability to integrate new appendages. This suggests that the designed configuration may offer significant benefits in augmented manipulation tasks.














